
智能汽車是全球汽車產業里的變革性技術,已引起世界各國的激烈角逐,中國發展智能汽車也已經形成共識,從頂層規劃到產業、政策逐漸完善,智能網聯技術研發逐漸進入商業化的階段。
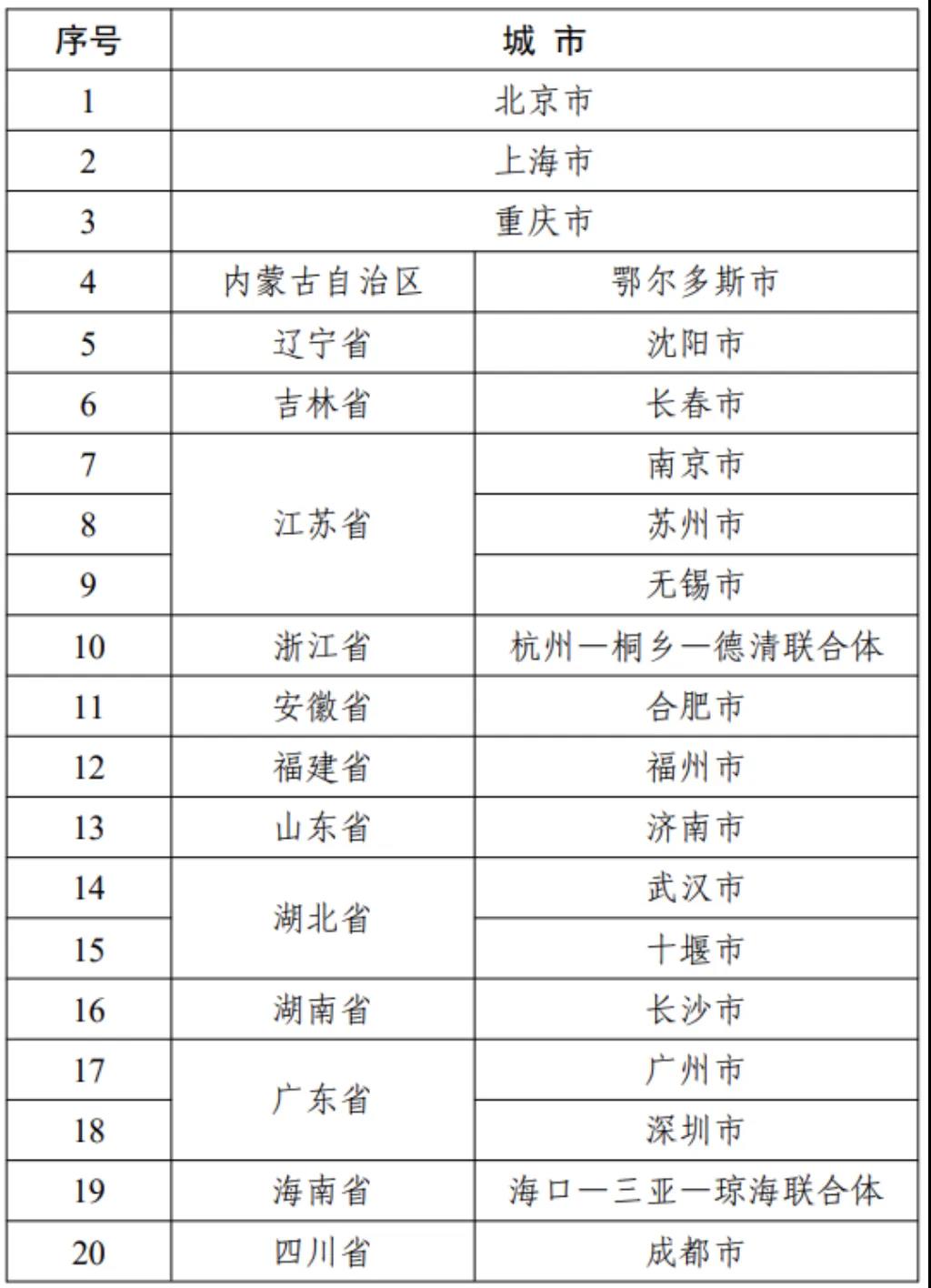
2024年7月1日,工業和信息化部、公安部、自然資源部、住房和城鄉建設部、交通運輸部等五部門聯合公布智能網聯汽車“車路云一體化”應用試點城市名單,要求各試點城市按照《工業和信息化部 公安部 自然資源部 住房和城鄉建設部 交通運輸部關于開展智能網聯汽車“車路云一體化”應用試點工作的通知》扎實推進建設任務,確保試點工作取得實效,加快形成可復制可推廣的經驗,進一步推進我國智能網聯汽車產業和技術的發展。
本文對目前全球智能網聯汽車重點標準法規政策進行解析匯總,借鑒國外法規、制度及創新經驗,統籌產業發展對標歐盟Horizon Europe、美國ISO 等技術研發與管理法規銜接的機制體系。
01 UN R171駕駛員控制輔助系統(DCAS)法規
02 關于UN R79.05轉向裝備修正案的提案
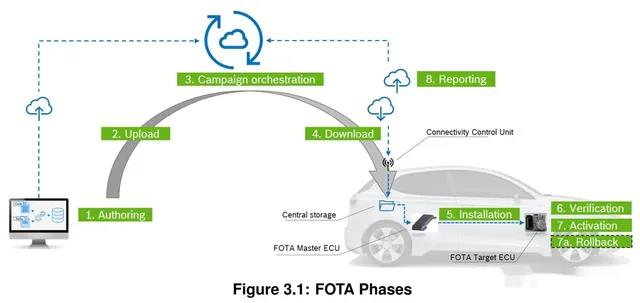
03 ISO 24089 道路車輛 軟件升級工程解析
04 FMVSS 127美國輕型車輛自動緊急制動系統法規
05 IIHS 駕駛自動化安全保障測試協議與評級指南
1、UN R171駕駛員控制輔助系統(DCAS)法規
2024年5月20至24日,聯合國世界車輛法規協調論壇(WP.29)自動駕駛與網聯車輛工作組(GRVA)第19次會議在美國底特律召開。會議審議了適用于L2級駕駛輔助系統的“駕駛員控制輔助(Driver Control Assistance Systems,DCAS)法規”第一版草案的補充修訂,且確定該法規編號為UN R171。
UN R171封閉道路主要測試項目:
- 行駛車道上的定位測試
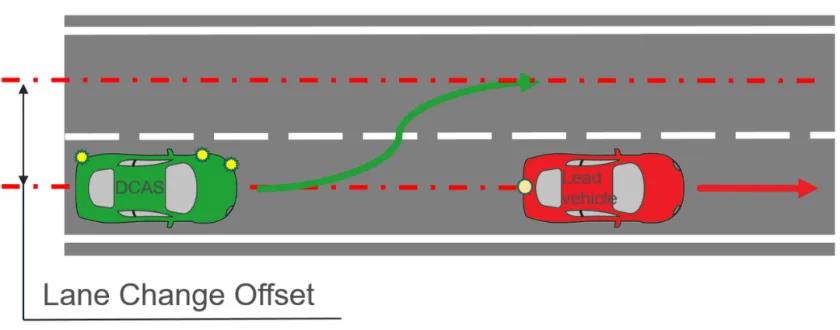
- 駕駛員主動變更車道測試
- 系統發起的車道變更測試
- 前方直線路段上靜止的車輛測試
- 前方彎曲路段上靜止的車輛測試
- 前方直線路段行駛速度較慢的車輛測試
- 前車切出測試
- 車輛從相鄰車道切入測試
- 車道內前方靜止的行人測試
- 車道內前方靜止的自行車測試
- 行人闖入VUT(Vehicle Under Test)路徑測試
- 自行車闖入VUT路徑測試
- 行人在交叉路口進入VUT路徑測試
- 自行車在交叉路口進入VUT路徑測試
- VUT轉彎穿過迎面而來的車輛的路徑測試
- VUT在十字路口穿過車輛目標的直線路徑測試
UN R171公共道路主要測試項目:
- 選擇車道測試
- 進入環島或在穿過環島時退出測試
- 非變道情況下離開其行駛車道測試
- 車輛轉彎測試
- 車輛出發或到達停放位置測試等

2、關于UN R79.05轉向裝備修正案的提案
在輔助駕駛領域,誕生了眾多與車輛橫向控制相關的輔助轉向功能,比如車道偏離輔助、車道中心保持、自動變道等,而這些功能的實現均依賴車輛的轉向系統。
2023年9月25至29日,聯合國世界車輛法規協調論壇(WP.29)各相關方提交了關于制動(UN R13, 13-H, UN R90, UN R152)、轉向(UN R79)及電子穩定性控制(UN R140)、信息安全/軟件升級(UN R155)法規的一系列修訂案。
UN/ECE R79協議是聯合國歐洲經濟委員會(UN/ECE)針對自動駕駛技術制定的法規,全稱為《關于就轉向裝置方面批準車輛的統一規定》。
UN/ECE R79涵蓋了自動駕駛技術的各個方面,包括對車道標線、車道保持、自適應巡航控制、自動緊急制動、自動泊車等功能的規范,針對不同輔助轉向功能的性能要求和測試方法作了具體要求,以期可以提升車輛的駕駛安全性。
UN/ECE R79對自動駕駛應用場景分類:
- 車速小于10km/h的輔助駕駛功能,如低速或者輔助泊車(適用ADAS功能:APA/RPA)
- 通過車道內的調整,輔助駕駛員保持在選定車道下的行駛(適用ADAS功能:LDP/LKA)
- 由駕駛員啟動該自動駕駛模式,在駕駛員的命令下,自動駕駛系統可執行單車道的車道轉換
- 由駕駛員啟動該自動駕駛模式,并經駕駛員同意確認,自主的變換車道(適用ADAS功能:推薦變道(UN/ECE R79未對其做具體要求))
- 由駕駛員啟動該自動駕駛模式,可長時間無需駕駛員進一步確認可連續變換車道(適用ADAS功能:自主變道(UN/ECE R79未對其做具體要求))
3、ISO 24089 道路車輛 軟件升級工程解析
隨著軟件更新的頻繁發生,確保每輛車的當前配置信息準確無誤變得至關重要,這對于保障軟件質量、網絡安全和道路車輛的安全至關重要。
ISO24089為車輛軟件升級提供了一個標準化的框架,強調了體系定義和法規要求之間的協同作用,致力于為SUMS體系(軟件更新管理系統)的形成貢獻力量,以提高軟件升級過程中的網絡安全和安全性。
ISO 24089不僅提供了與汽車全生命周期的軟件更新和網絡安全有關的技術要求,而且還提供了整個汽車供應鏈的組織和程序要求,通過軟件更新工程活動建立對未來移動解決方案的信任:
- 車輛軟件更新是安全的,并且經過驗證
- 實施軟件更新的流程和持續改進
- 在汽車供應鏈上建立共同的安全和網絡安全意識
4、FMVSS 127 美國輕型車輛自動緊急制動系統法規
2024年5月9日,美國國家高速公路交通安全管理局(NHTSA)發布了關于制定輕型車輛自動緊急剎車系統(AEB)聯邦機動車輛安全標準的最終規則通報,主要包括有關AEB系統的四方面要求,相關標準的符合性要求將于2029年9月1日實施。
FMVSS 127規定了輕型車輛自動緊急制動(AEB)系統的性能要求,其目的是減少因駕駛員未剎車或未施加足夠制動力以避免或減輕碰撞導致的事故死亡和受傷人數,適用于乘用車和車輛總重量為4536kg(10000磅)或以下的多用途乘用車、卡車和公共汽車。
測試項目:
- 車-車測試
- 車輛-行人測試
- 誤觸發測試

5、IIHS 駕駛自動化安全保障測試協議與評級指南
2024年3月中旬,美國汽車安全評測機構IIHS發布了《部分駕駛自動化安全保障測試協議與評級指南(Safeguards For Partial Driving Automation Test Protocol and Rating Guidelines Version I)》,同時發布了十四款車型的評級測試結果。
測試試驗項目:
- 駕駛員監控系統 (DMS) 相機遮擋測試
- 駕駛員監控系統 (DMS) 駕駛員遮擋測試
- 駕駛員監控系統 (DMS) 眼動追蹤測試
- 駕駛員監控系統 (DMS) 頭部跟蹤測試
- 駕駛員監控系統 (DMS) 手部跟蹤/監控測試
- 注意提醒、緊急升級對策、鎖定確認測試
- 自動變道測試
- ACC 自動恢復測試
- 駕駛自動化與駕駛員共駕轉向等測試

總而言之,智能網聯汽車是人工智能、移動互聯網、新一代信息技術、交通能源系統等技術的綜合性應用平臺,是城市智能交通系統的重要環節,是構建綠色生態社會的核心要素,其意義不僅在于汽車產品與技術的升級,也帶來汽車及相關產業生態和價值鏈體系的重塑,是國際公認的未來發展方向和關注焦點之一。
轉自汽車測試網
