
#1CAN定義
CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國際標準化的串行通信協議。在汽車產業中,出于對安全性、舒適性、方便性、低功耗、低成本的要求,各種各樣的電子控制系統被開發了出來。由于這些系統之間通信所用的數據類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數量也隨之增加。為適應“減少線束的數量”、“通過多個LAN,進行大量數據的高速通信”的需要,1986 年德國博世公司開發出面向汽車的CAN 通信協議。此后,CAN 通過ISO11898 及ISO11519 進行了標準化,在歐洲已是汽車網絡的標準協議。
CAN兩個ISO國際標準:
1)ISO11898 :定義了通信速率為 125 kbps~1 Mbps 的高速 CAN 通信標準,屬于閉環總線,傳輸速率可達1Mbps,總線長度 ≤ 40米。
2)ISO11519:定義了通信速率為 10~125 kbps 的低速 CAN 通信標準,屬于開環總線,傳輸速率為40kbps時,總線長度可達1000米。
#2種類
CAN總線根據CAN收發器的不同又分為3種:
1)高速CAN:
a.根據線纜的長度提供從5Kbit/s到1Mbit/s的波特率
b.高速CAN網絡在每個網絡端點端接一個120歐姆的電阻
c.電平靜默為2.5V,上下限是3.5V和1.5V
2) 容錯CAN:
a.提供從5?Kbit/s到125?Kbits/s的波特率
b.顯性時則為1V和4V
3)單線CAN:
a.提供從5?Kbit/s到125?Kbits/s的波特率
b.單線CAN的波特率一般為33.3KHz
#3一般燃油車的CAN網絡分類
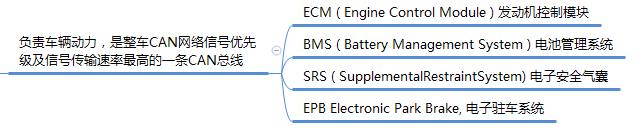
1)PT CAN (PowerTrain CAN ) 動力總成CAN總線
2)CH CAN (Chassis CAN) 底盤控制CAN總線

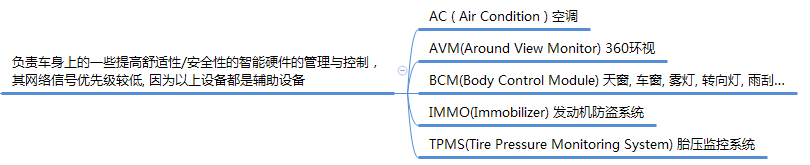
3)Body CAN車身控制總線
4)Info CAN ( Infomercial CAN ) 娛樂系統總線

5)DiagCAN ( Diagnose CAN ) 診斷控制總線

#4汽車CAN網絡拓撲圖

#5CAN網關

#6CAN組成
在實際應用中,CAN總線的一個幀主要由幀信息,幀ID和幀數據組成。
1)幀信息:四類,標準數據幀(汽油車、電機)、標準遠程幀(少見)、擴展數據幀(廣大柴油車、部分汽油車)、擴展遠程幀(少見)。
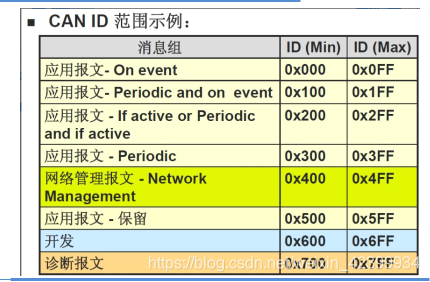
2)幀ID:是CAN的一種“地址”。CAN有個特點是競爭機制,幀ID越小越有占用總線資源的權利,越會優先發送。
DBC文件:在車輛行業中,如果對車輛CAN總線上的每個幀ID及每個幀數據都做出了標準的解釋,形成了文件的話,此文件為DBC文件。
3)幀數據:與串口相比,CAN的幀數據只有8個字節,即64個位,不會再多了。但CAN FD作為新型總線解決了僅有8字節這個問題。
4)終端電阻:CAN和RS485一樣,要在終端減少差分信號的反射,如不在兩個終端加電阻,信號會反彈回來影響通訊。終端電阻在CAN總線上要有兩個,阻值為120歐姆,并聯,最遠的兩端一邊一個。如果有多個節點的話,終端電阻應適當加大。
5)波特率:常見的CAN波特率大多都是整數。常見的車輛波特率有500K,250K,125K,100K。
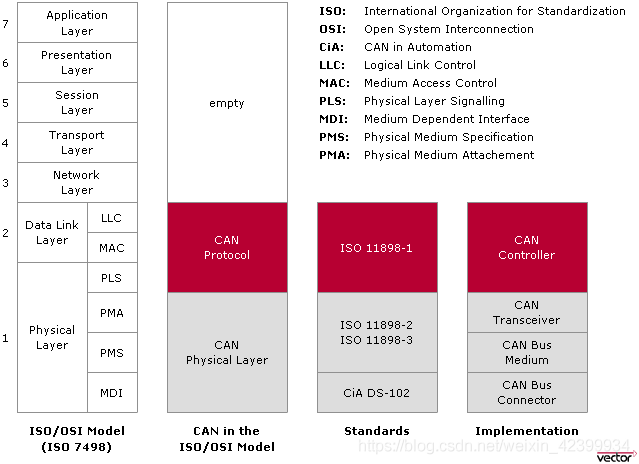
#7CAN標準
CAN標準分為底層標準(物理層和數據鏈路層)和上層標準(應用層)兩大類。
底層標準:
CAN底層標準都相同,涵蓋OSI模型中的物理層和數據鏈路層,與ISO/OSI模型的對應關系如下圖所示:
-
ISO 11898-1:數據鏈路層協議,描述CAN總線的基本架構,定義不同CAN總線設備在數據鏈路層通信方式
-
ISO 11898-2:高速CAN總線物理層協議,最高數據傳輸速率 1Mbps,應用為兩線平衡式信號(CAN_H, CAN_L)
-
ISO 11898-3:定義低速CAN總線(LS-CAN, Fault-Tolerant CAN)物理層標準,數據傳輸速率在 5Kbps ~ 125Kbps 。Fault-Tolerant是指總線上一根傳輸信號失效時,依靠另外的單根信號也可以通信
-
ISO 11898-4:定義CAN總線中的時間觸發機制(Time-Triggered CAN, TTCAN),定義與ISO 11898-1 配合的幀同步實體,實現汽車ECU之間基于時間觸發的通信方式。
上層標準:
涉及到例如流控制、設備尋址和大數據塊傳輸控制等,不同應用領域或制造商會有不同的做法,沒有統一的國際標準。
轉載汽車電子相關文章
轉自汽車電子與軟件
