
隨著深度學習和計算機視覺技術的興起,自動駕駛為提升交通安全與效率提供了新的解決方案。未來的自動駕駛汽車擁有全面的駕駛感知系統,可以識別道路交通標志、汽車、行人、路況等外部人和物,智能的決策系統對感知的信息快速處理和分析,執行系統精確的執行加速、制動、停車、轉向等命令。
自動駕駛汽車測試是自動駕駛研發中的重要環節,也是自動駕駛技術發展的重要支撐,隨著智能網聯汽車高等級的自動化和網聯化系統不斷產業化落地,對測試的依賴越來越深入,尤其是面對即將量產落地的L3級以上自動駕駛產品,對現有的測試技術、標準和法規,都提出了新的挑戰,需要新的技術突破。自動駕駛汽車本身結合了車輛技術,人工智能,模式識別,5G通訊,傳感器融合等多領域,跨學科知識。跟傳統的汽車測試有很大不相同,為了應對千變萬化的交通場景,需要海量的數據對自動駕駛算法進行訓練,通過不斷的迭代,才能覆蓋盡可能多的場景。并且測試會貫穿車輛的生命周期,即使車輛已經賣出,并上路行駛,也會定期遠程升級,以便覆蓋新的場景。
自動駕駛汽車測試類型及測試內容是什么?

數據采集在自動駕駛開發中扮演什么樣的角色?
眾所周知,自動駕駛的發展和人工智能技術進步密不可分,數據、算力和算法作為人工智能的三要素顯著影響著自動駕駛技術的嫻熟程度,而在這三要素中,數據有著舉足輕重的作用。
自動駕駛時代,訓練數據集非常重要,但是成本也比較高。訓練數據集的構建分車端、本地端和云端三個環節。訓練數據集海量數據的存儲和處理是一個非常大的挑戰,數據集的“清洗”提純也是一個挑戰。
AI只有經過大量的訓練,神經網絡才能總結出規律,應用到新的樣本上。如果現實中出現了訓練集中從未有過的場景,則網絡會基本處于瞎猜狀態,從而出現錯誤,因此可靠并且高質量的數據采集在自動駕駛開發過程中承擔的作用就顯得尤為重要,不可或缺。
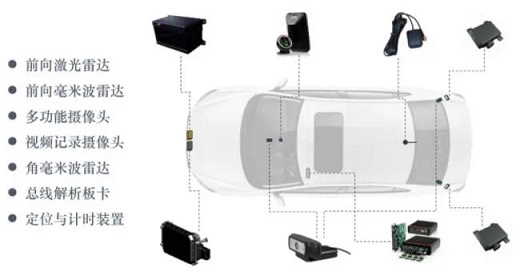
為了保證數據采集的準確性,智能駕駛的數據采集車輛搭載了攝像頭、雷達等大量不同的傳感器。這些傳感器從整車布置的安裝結構設計、FOV校核,再到實車的裝配標定,都需要保證位置準確和穩定,從而支持不同位置傳感器數據可以順利拼接。
實車采集過程中,需要盡可能覆蓋各種用戶場景。一般來說,道路狀態、交通信號和標識、各類車輛和行人目標、天氣環境等,都是影響智能駕駛的關鍵因素,路試采集場景需要涵蓋城市、鄉村、高速、隧道以及白天和夜晚等,以確保盡可能覆蓋用戶各種實際場景。采集過程中,全面的了解測試進展以及測試車輛狀態,保證測試數據的有效性,也是測試管理面臨的重要挑戰。因此需要用到車隊管理系統,基于此系統可以實現:1、實時定位監控,車輛位置實時展示,包括車輛實時運動狀態、實時車速等;2、實時報警事件消息推送,并在地圖上動態展示報警的位置;3、車輛數據統計,包括里程統計、告警統計、狀態統計等;4、駕駛員數據統計,具體包含駕駛員行車時間里程統計、告警統計、DMS監控數據統計等;5、駕駛員DMS監測和報警,對于報警消息實時提醒。
通過數據采集系統,可將自動駕駛車輛各類傳感器類型的數據進行采集處理,包括常見的CAN、CANFD、 ETH車載以太網數據等。用戶可以通過數據中心訪問數據,進行后續數據分析、數據標注、數據回注等,從而形成完整的數據閉環。
自動駕駛汽車到底需要哪些類型的傳感器?
自動駕駛汽車是集感知、決策和控制等功能于一體的自主交通工具,其中,感知系統代替人類駕駛人的視、聽、觸等功能,融合攝像機、雷達等傳感器采集的海量交通環境數據,精確識別各類交通元素,為自動駕駛汽車決策系統提供支撐。
1、攝像頭
攝像頭按視頻采集方式分為:數字攝像頭和模擬攝像頭兩大類。
車載上一般使用的是數字攝像頭,它可以將視頻采集設備產生的模擬視頻信號轉換成數字信號,進而將其儲存在計算機里。
模擬攝像頭只能將捕捉到的視頻信號,經過特定的視頻捕捉卡將模擬信號轉換成數字模式,并加以壓縮后才可以轉換到計算機上運用。
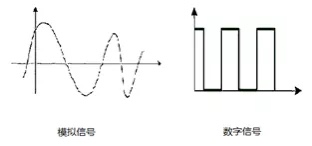
舉個例子來,我們使用的固定電話就屬于模擬信號,它在通話過程中容易產生噪音(電流聲或聽不清)的情況。而我們的手機為了保持很好的通話質量,就將電話的模擬信號進行了數字化,手機之間的通話質量就非常清晰,同樣原理使用數字攝像頭能有效減少圖像中的噪點和提升成像效果。
一句話概括:模擬視頻信號是在一定的時間范圍內可以有無限多個不同的取值。而數字視頻信號是在模擬信號的基礎上經過采樣、量化和編碼而形成的。模擬信號容易產生信號噪音和干擾,已逐步被數字信號取代。

圖片來源:博世官網
2、雷達
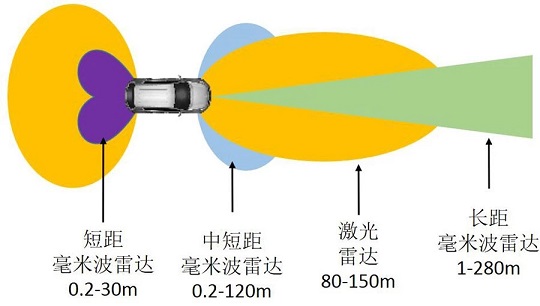
雷達能夠主動探測周邊環境,比視覺傳感器受外界環境影響更小,是自動駕駛汽車的重要傳感器之一。雷達通過向目標發射電磁波并接收回波,從而獲取目標距離、方位、距離變化率等數據。根據電磁波波段,雷達可細分為激光雷達、毫米波雷達和超聲波雷達等3類。
自動駕駛數據標注工作內容有哪些?
數據標注指的是,通過人工或者一定的工具,將少量幀用手工標注,且是精細標注。大部分做機器標注,即簡化標注。來給數據集添加真值信息,相當于為機器學習系統提供”標準答案”。

人工標注人員對于語義信息更加擅長,但是計算機對于幾何,重建,三角化,跟蹤更加擅長;同時,隨著數據規模的增長,不可能無限地擴大標注團隊的規模。所以,更加精確的數據標注需要標注人員和計算機協作進行。
自動駕駛場景庫與虛擬仿真測試
場景是自動駕駛測試系統中相當重要的一環,測試場景的多樣性、覆蓋性、典型性等能夠影響到測試結果的準確性,從而保證自動駕駛的安全與質量。 場景,指的是行駛場合和駕駛情景的組合,它受行駛環境的深刻影響,如道路、交通、天氣、光照等因素,共同構成整個場景概念。場景是在一定時間和空間范圍內環境與駕駛行為的綜合反映,描述了道路、交通設施、氣象條件、交通參與物等外部狀態以及自車的駕駛任務和狀態等信息。從場景架構來看,有不同的行駛場合,像高速公路、鄉村道路、城市工況、機場、碼頭、封閉園區等;在該場合下,如何駕駛、駕駛任務、駕駛速度、駕駛模式等一起構成了整個場景的三維架構。
自動駕駛仿真是借助計算機虛擬技術對實際交通系統進行某種層次的抽象。通過把大量自動駕駛開發和測試的成本轉化為GPU的物料成本和工程師的知識經驗成本,進而大大緩解該痛點。
仿真測試執行包含兩個方面的工作:(1)對測試場景庫的維護和針對不同算法或功能合適的測試場景進行運行測試;(2)在測試完成后,整理并提供清晰的測試報告,并提供測試結果的統計數據,為算法團隊的改進提供有效支撐。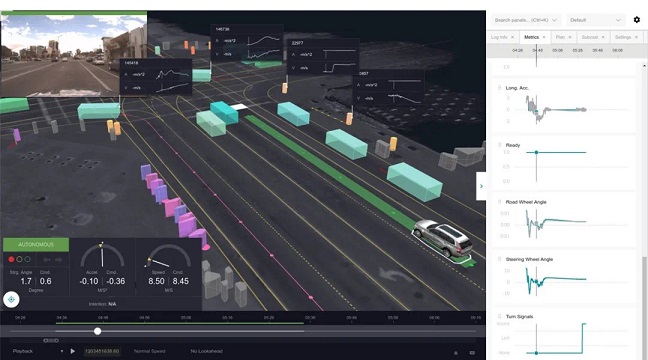
▲ 某自動駕駛仿真軟件的運行可視化界面
在仿真測試里,根據自動駕駛測試的關鍵要素,需要建如下的模型,包含最傳統的車輛動力學模型、駕駛人模型、靜態環境模型、動態交通模型、環境感知傳感器模型。建模要關注兩方面,一個是計算效率、一個是計算精度,兩個是彼此制衡。
除了純虛擬環境的測試之外,還有多物理系統在環的仿真測試,就是說要能夠進行化學感知系統、決策規劃系統、控制執行系統的在環測試。
基于場景的虛擬仿真測試,是未來自動駕駛汽車測試的一個發展趨勢,也是必由的途徑。
自動駕駛場景分類都有哪些?
A-事故場景
事故可以看做是交通安全的一個濃縮機,能夠體現出實際交通環境的高危場景,事故場景研究目前以深度事故研究數據為主, 如GIDAS, CIDAS等
B-開放道路場景
開放道路場景來源于人們的日常駕駛數據以及實車道路測試數據,道路場景能夠很好地體現隨機性、復雜性以及區域特征,可用于分析真實的交通環境和駕駛行為特征
C-法規標準場景
國內外法律法規涉及的場景, 如GB/ISO/ECE/NHTSA/SAE/Euro-NCAP等機構組織的測試標準,法規標準場景是自動駕駛功能在研發和定義階段需要滿足的最基本要求
D-功能交互場景:
AD AS系統或自動駕駛系統是由橫向、縱向-預警或控制等多個子功能構成的, 各個功能之間經常存在功能交互區域, 如ACC和AEB系統都對車輛的縱向運動進行控制, 兩功能在交互場景區域作用時是否存在問題需要進行驗證;功能交互場景能夠測試智能系統功能邏輯交互上的重疊區與間隔區,發現功能交互漏洞與邏輯混亂等問題
E-虛擬重構場景
真實駕駛過程中場景數目是無限的,使用參數隨機生成算法可以重組場景:虛擬重構場景,能夠補充大量來知工況的測試場景,打破數據采集的局限性。
硬件在環測試主要是測什么?
硬件在環指的是,利用仿真軟件,實時機和硬件IO接口,對接到真實的ECU,在實時的環境進行算法測試。

自動駕駛汽車,相對于傳統車輛,驗證成指數級增加。都依靠實車測試,從時間上和成本上都不現實,進行充分的仿真測試非常關鍵。
場地測試主要測試內容包括什么?
場地測試指的是,ADAS原型車在封閉的試驗場或者開放的場地進行真實的道路測試。
自動駕駛汽車的場地測試分有兩種,一種就是在開發的環境下進行真實的道路測試,而另一種則是在自動駕駛仿真測試平臺上進行虛擬測試。而目前幾乎所有車企和自動駕駛科技公司,均是以虛擬測試為主,真實的道路測試為輔。
結合工業和信息化部、公安部、交通運輸部等三部委共同發布的《智能網聯汽車道路測試管理規范(試行)》,“考試項目”設置可以包含以下幾個方面:1、基本交通管理設施檢測與響應能力測試,測試內容應包含《GB5768 道路交通標志和標線》、《GB14887 道路交通信號燈》、《GB14886道路交通信號燈設置與安裝規范》等標準要求的道路交通設施種類和安裝規范等內容;
2、前方車道內動靜態目標(機動車、非機動車、行人、障礙物等)識別與響應能力測試,測試內容應包含感知識別不同目標(非機動車、行人、障礙物)的類型和狀態、跟隨不同交通參與者(機動車、非機動車、行人)行駛、車速車距控制等內容;
3、遵守規則行車能力測試,測試內容應包含超車、并道、通過交叉口等內容;
4、安全接管與應急制動能力測試,測試內容應包含靠邊停車與起步、應急車道內停車、人工接管等內容;
5、綜合能力測試,綜合考察自動駕駛汽車對交通語言認知能力、安全文明駕駛能力、復雜環境通行能力、多參與對象協同行駛能力、網聯通訊能力等內容。
未來的自動駕駛汽車對安全性要求極其嚴格,需要通過靈活的測試,才能實現快速創新,同時保證測試嚴格性和效率。
轉載汽車電子相關文章
轉自汽車測試網
