
01.檔位管理
在開車的時候,有沒有遇到過有時候掛擋掛不上去,比如不踩剎車,是掛不上D檔的。這個就是VCU控制的。當你在掛擋時,檔位控制器將檔位請求信號發送給VCU,VCU判斷換擋條件是否滿足,再執行檔位切換。
都有哪些條件呢?
1、鑰匙信號是否在ON檔;
2、整車是否上高壓;
3、低壓蓄電池是否在有效范圍內(比如9~16V);
4、駕駛員是否系安全帶、踩剎車;
5、車速是否為零。
檔位的控制主要分為三個階段,分別為上電階段、正常運行階段、下電階段。在車輛上電時,VCU默認向檔位控制器發送P檔請求,并且在儀表盤上點亮P檔指示燈。在車輛下電時,VCU會檢測到車速達到要求時,發出P檔請求。在車輛正常運行時,會檢測上述的那些條件是否都滿足,只有全滿足后才能正常進行檔位切換。主要的輸入信號如下所示:輸入信號:檔位請求;當前車速信號,高壓狀態信號,鑰匙信號,制動踏板信號。
02.踏板信號管理
踏板信號包括油門和剎車,其是整車最重要的輸入量之一,直接反映了駕駛員的操作意圖,并且影響車輛和人員的安全,因此這兩個信號通常是有冗余的,通常是各有兩路獨立的信號采集鏈路,在此基礎上,還有很嚴格的錯誤檢測機制,比如:
1.當兩路油門或者剎車信號的差值超過一定范圍,則認為是踏板開度不同步,報踏板故障;
2.當踏板傳感器的供電電壓不在正常范圍,報踏板故障;
3.當兩路信號電壓不在正常范圍時,報踏板故障;
4.當油門和制動踏板同時請求時,優先響應制動踏板。
當上述的前三條條故障中任意一條發生,VCU中使用該信號的軟件模塊不再使用該信號進行處理,并且車輛進入跛行,點亮儀表盤上的故障燈。
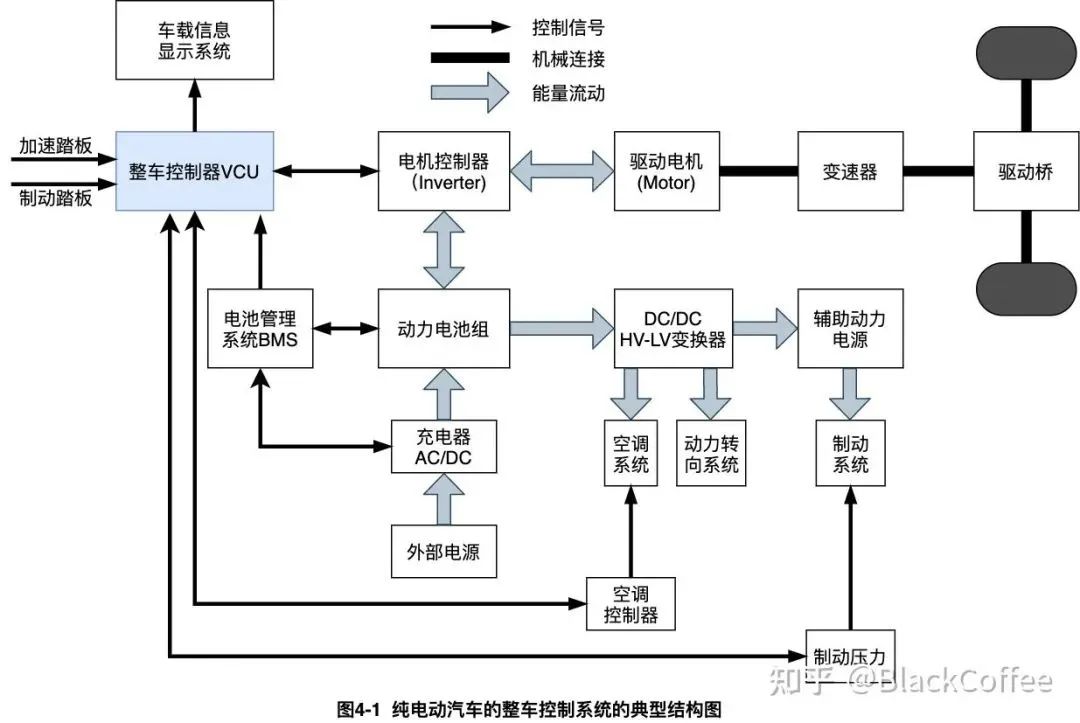
03.局域網內網絡管理
如圖1中,VCU負責局域網內控制器的上下電管理。當VCU收到鑰匙信號時,VCU首先被喚醒,并且開始自檢,自檢主要包括上電過程中是否有故障報出、低壓蓄電池電壓是否在正常范圍,自檢通過后通過網絡管理報文或者是KL15硬線,將局域網的控制器節點進行喚醒。下電過程則是,當VCU檢測到鑰匙信號OFF后,VCU首先停發網絡管理報文,等待局域網內其他各節點都停發網絡管理報文后,再一起停發應用報文,同步將進入下電休眠。
04.車輛驅動管理
車輛驅動管理包括駕駛模式管理,扭矩輸出管理、定速巡航管理、自適應巡航管理等。駕駛模式管理主要是按ECO、NORMAL、SPORT三種模式來管理動力輸出和功率輸出。在ECO模式下通過限制功率輸出、車速來降低能量消耗,達到節能經濟的目的。NORMAL通常為整車默認模式,能耗、車速都相對均衡,運動模式下通常是默認整車設計的最大功率輸入,提供強勁的動力表現。這些控制都是通過油門開度與不同的扭矩響應來達到的,在不同模式下有不同的映射表,也就是所說的map。在ECO模式下,扭矩輸出比較柔和。在SPORT模式下,映射表中的對應值更高,也就意味著響應更加快速,動力來的更加澎湃。
VCU給電驅總成的扭矩請求值是根據三個值來確定的。其中之一為VCU根據不同駕駛模式下,標定的map表中當前轉速對應的最大扭矩與油門開發的乘積。第二個為BMS在當前條件下最大的輸出功率值。第三個為當前轉速下電驅總成能輸出的最大扭矩值。VCU根據這三個值,選擇其中最小的發送給電驅總成,進行扭矩響應。另外為了保證油門響應更加線性,在將扭矩請求值發送給電驅總成之前還會收扭矩變化率map影響。在ECO模式下,扭矩變化率更加平緩,則動力響應偏慢,比較柔和,SPORT模式下扭矩變化率比較激進,扭矩變化率更大,動力響應快。
05.高壓系統上下電管理
高壓系統(如圖3所示)的上下電,在純電車中,這是很重要的一環,首先高壓存在安全問題,另外如果高壓無法上電,車輛是無法開動的,類似于傳統車上,發動機沒有啟動,車輛動不了一樣。
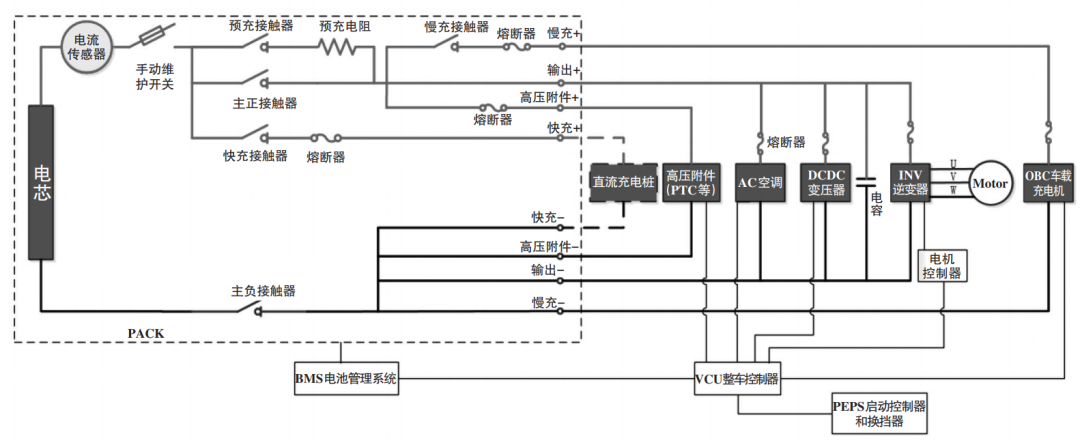
圖3 高壓系統電氣圖(來源知網)
高壓上下電需要滿足的原則:
1、避免車輛出現非預期的加速、減速、轉向等動作;
2、應避免因高壓故障引起人員傷亡及設備損壞;
3、滿足高壓上下電性能要求;
首先高壓上電功能需求主要包括:鑰匙上電、直流/交流充電、遠程控制(例如遠程打開空調),這三種場景僅僅是喚醒的方式不一樣,高壓上電的邏輯和時序是差不多的。對于整個上電過程,通過會有時間要求,比如要求1s內局域網內各ECU(通常包括VCU、DCDC、DCU、BMS等)應完成上電流程,并進入工作模式。在上電流程中,首先是VCU被喚醒(鑰匙喚醒、網絡喚醒、或者充電cc信號硬線喚醒),啟動后發送請求閉合HVIL回路使能線和必要的12V低壓繼電器的CAN報文,同時監控HVIL回路狀態,然后DCU、DC/DC、BMS被喚醒(VCU發送的網絡管理報文或者IG ON信號喚醒)并進行自檢,監控HVIL回路狀態,對于BMS來說還需計算絕緣阻值,確認絕緣是否正常,無故障后進入待機模式(standby狀態)。隨后VCU請求BMS閉合主繼電器,BMS則先后閉合主負繼電器和預充繼電器,當檢測到母線電壓達到閾值后,判斷預充電成功,然后閉合主正繼電器,并斷開預充繼電器,到這則高壓上電完成,在VCU請求BMS閉合主繼電器時,同時也會請求DCU、DC/DC進入工作模式,時序圖如圖2所示。
預充是將預充電阻串聯到高壓回路中,由預充電阻分掉一部分電壓,然后,隨著各ECU內的電容充電上來,等到電壓上升到某一閾值,主正繼電器閉合,這樣預充回路就完成了它的工作了,如圖4。

圖4 高壓正常上電時序(來源知網)
在正常下電流程中,當檢測到鑰匙信號、硬線信號關閉或網絡喚醒信號停發,VCU立即請求DCU離開工作模式,并且功率器件迅速降低功率,隨后VCU請求DC/DC離開工作模式,然后VCU在請求BMS斷開繼高壓繼電器,BMS完成響應后,VCU斷開HVIL回路和低壓繼電器,各節點進入下電休眠流程,如圖5所示。
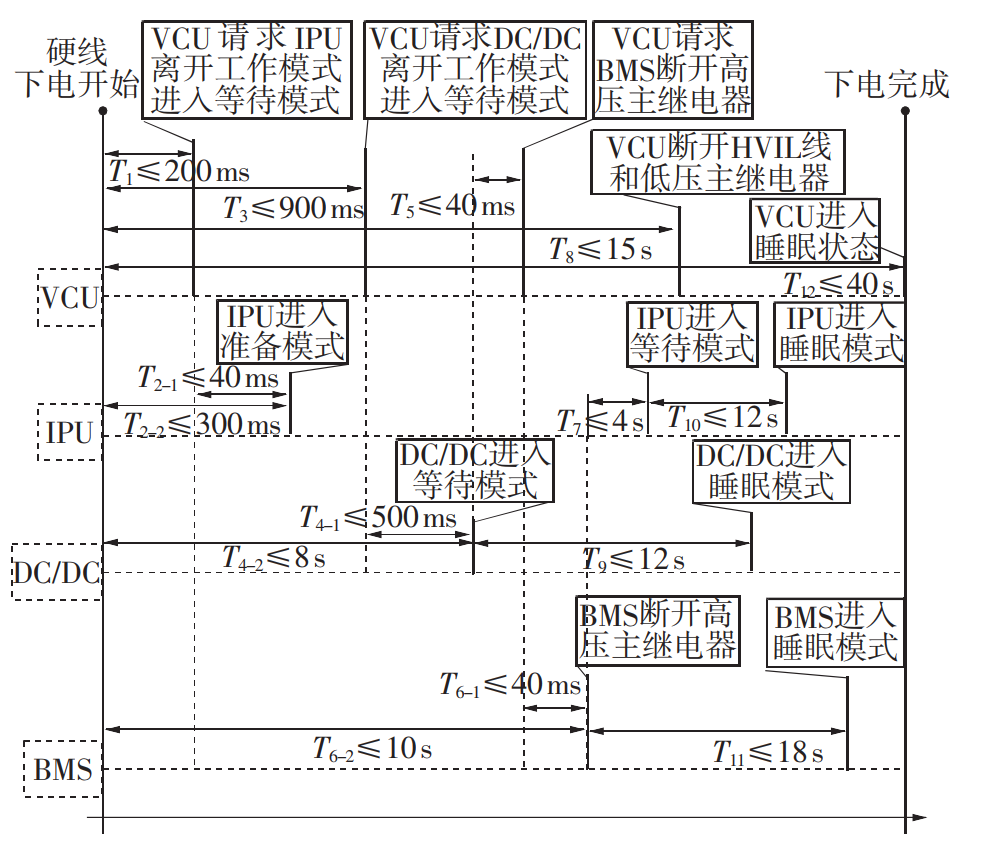
圖5 高壓正常下點(來源知網)
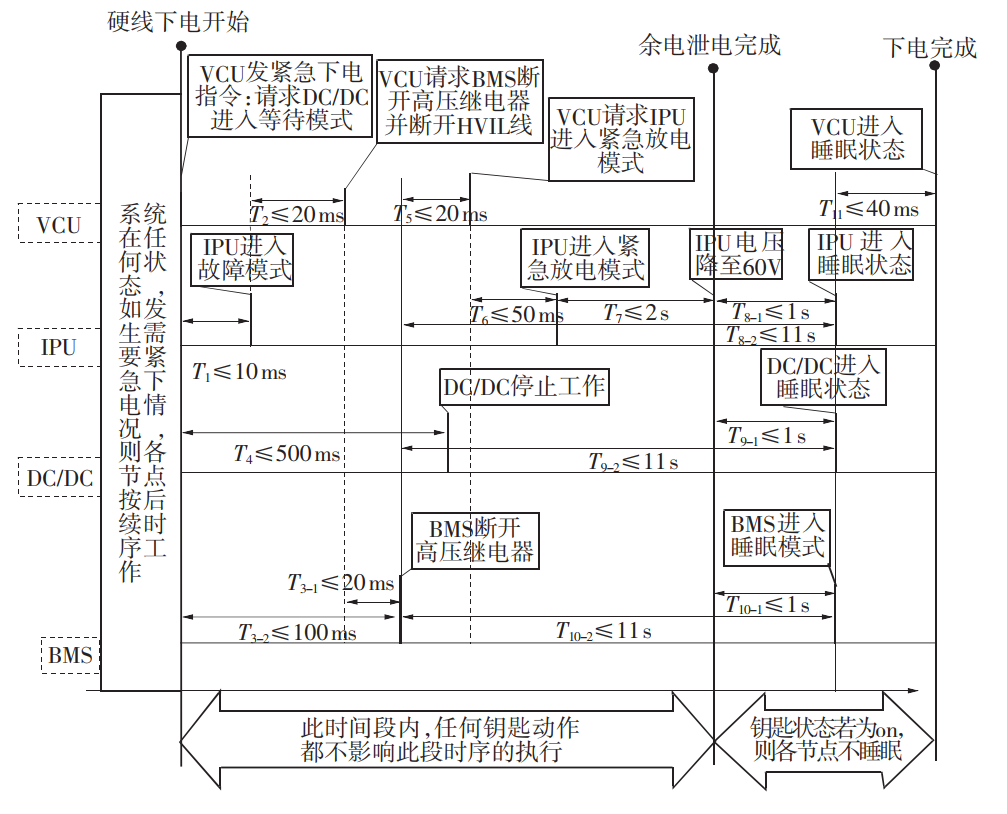
在正常上電狀態下,如果出現絕緣阻值低于閾值、高壓互鎖斷開、IGBT過流等嚴重故障時,VCU會進行緊急下高壓電流程,首先VCU請求DC/DC脫離工作模式,DCU進入failure模式,隨后VCU請求BMS斷開高壓繼電器,并且斷開HVIL回路,隨后 VCU 請求 IPU 進入緊急放電模式, DCU在規定時間內完成余電泄放, 若鑰匙為關閉狀態,則各節點進入休眠流程,如圖6所示。
06.整車能量管理
能量管理是VCU根據動力電池充放電能力、車輛運行模式、運行狀態,以及各用電負載的優先級,實時調整各用電負載的功率。在常規工況下,各個用電負載的用電優先級為DCDC>電池制熱/制冷>乘員艙制冷>乘員艙制熱>電機功率;在急加速工況下,通過判斷駕駛員是否有緊急加速意圖,VCU的能量管理優先滿足動力需求,限制空調等系統的工作。在動力電池饋電工況下,優先滿足基本駕駛需求。空調系統功能會被限制。除了以上簡介的之外,還有PTC的控制,自動駕駛中的定速巡航,自適應巡航都是需要VCU來實現的。
07.VCU發展趨勢
在當前電子電氣架構變革之際,VCU也將朝著集成化和域控化發展。集成化是指將整車控制系統中的部分控制功能集成到一個控制器中,例如比亞迪E3.0平臺中的八合一,其就是將原來分開的VCU、電機控制器、BMS、車載充電器集成到一個控制器中,如圖7所示。
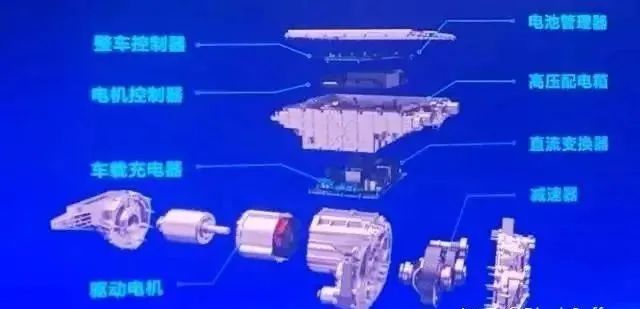
圖7 比亞迪E3.0平臺的八合一
域控化是在集成化的基礎上將VCU升級為動力域的域控制平臺,更高性能的芯片將使其支持整車實現SOA服務架構,另外可以嘗試更復雜的模型預測控制算法,讓VCU對需求扭矩、能量分配和管理做更好,更加精準的控制和分配,從而達到整車電耗的優化,提升電車的續航里程。
轉自汽車電子與軟件
